
ジェイテクトグループ オフィシャル通販サイト
 ジェイテクトエレクトロニクス 公式サイト
ジェイテクトエレクトロニクス 公式サイト
PLC(プログラマブルロジックコントローラ)とは
PLC(プログラマブルロジックコントローラ)の働き
PLCとはプログラマブルロジックコントローラの事で、制御機能を実行するハードウェアとソフトウェアを搭載した小型産業用コンピュータのことを言います。
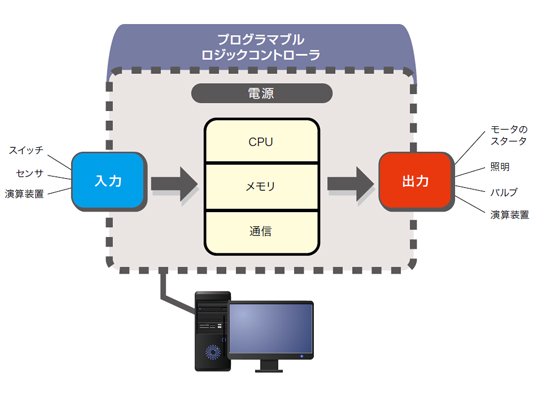
PLCは、中央演算装置(CPU)と入出力インタフェースシステムといった2種類の基本ユニットで構成されています。
CPUはPLCのすべての動作を制御しますが、さらに、プロセッサ部とメモリ部に分けることができます。
入出力システムは(スイッチ、センサなどの)ユーザ側装置と接続されます。
作動させるには、まずCPUが、接続されているユーザ側装置から入力データを「読み」取って、内蔵のメモリシステムに格納されている制御プログラムを「実行」します。プログラムは、通常、リレー型配線図に非常に良く似た言語であるラダー回路で記述され、動作を開始する前に
CPUのメモリにロードします。
最後に、このプログラムに基づいてPLCは装置に「出力」します。このプロセスは「スキャン」とも言われ、一般的には、中断することなく同じシーケンスで反復されます。
これが変更されるのは、制御プログラム自体を変更した場合となります。
ディスクリート用途
一般に、PLCは、あらかじめ機能を定義されているディスクリート入力と出力に基づいて、基本的にシーケンシャルな機械やプロセスを制御する場合に使用されます。
例えば、何かの物体があることをリミットスイッチが検出すればPLCに「オン」信号を送出し、物体が無ければ「オフ」信号を送出する回路がこの例となります。
通常、機械や装置は、あらかじめ決められている時刻になったりイベントが発生すると、動作を起こします。
予定されているシーケンスが中断されるのは、異常状態が 発生した場合のみとなります。
プロセス制御用途
PLCはまた、アナログ入出力を使用する連続プロセスも制御することができます。
例えば、温度センサは実際に測定された温度を0〜10 V などのアナログ信号に変換して送出することができます。
PLCプログラムは検出された値を常時モニタし、アナログ装置を作動させます。
このような使い方の例として、開閉するバルブの位置を0〜100%の間でセットしたり、モータのスピードを制御する場合があります。
連続動作の場合、いったんスタートすると、始まりや終わりが決められていないことが多いため、プロセス制御と呼ばれ、「安定した」動作状態にあるプロセスを保持します。
現在のPLC
PLC技術が発展するにつれ、プログラミング言語や通信機能もその他の重要な機能とともに強化されてきました。
現在のPLCでは、スキャン 時間が高速になり、I/Oも高集積化が進み大容量メモリや、新開発の装置を直接PLCに接続できる専用インタフェースも搭載されています。
また、他の制御システムと通信できるようになっただけでなく、レポート機能、機械またはプロセスの障害だけでなく、PLC内部の障害を診断する機能も持っています。
現在のPLCは、一般に、「サイズ」を用いて分類されます。
このサイズにより、PLCの機能や適応させる用途の種別を表すのが一般的です。
小型で一体型のPLCはメモリ容量や入出力点数が少なく、回路構成も限られます。
モジュール型PLCは複数の入出力モジュールを実装できるベースまたはラックを搭載し、さまざまな用途に対応できます。
ユーザに適したPLC
ユーザの用途にもっとも効率の良いPLCを選択するにはいくつかの判断基準があります。
選択を始める前に、装置やプロセスの「図」を書いてみてください。
このようにすると、どのような装置を使用するかとか、ハードウェア設置場所の物理的な条件は何かをはっきりさせることができす。
この「図」から、使用するアナログ装置やディスクリート装置モータの台数も決めることができます。
株式会社ジェイテクトエレクトロニクス(旧社名:光洋電子工業) PLCラインナップ
 JX-BASIC
JX-BASIC SJ-Etherシリーズ
SJ-Etherシリーズ DirectLOGIC
205、05、06シリーズ
DirectLOGIC
205、05、06シリーズ
 小型安全PLC AZ-C1シリーズ
小型安全PLC AZ-C1シリーズ SUシリーズ
SUシリーズ PLC周辺機器
PLC周辺機器PLC アプリケーション事例
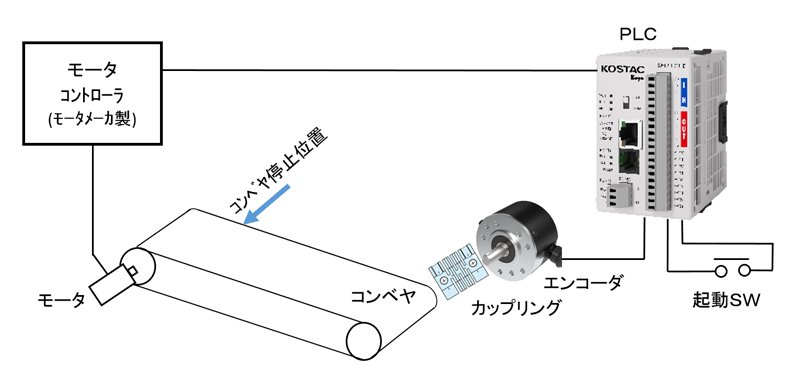 コンベア
移動/制御
コンベア
移動/制御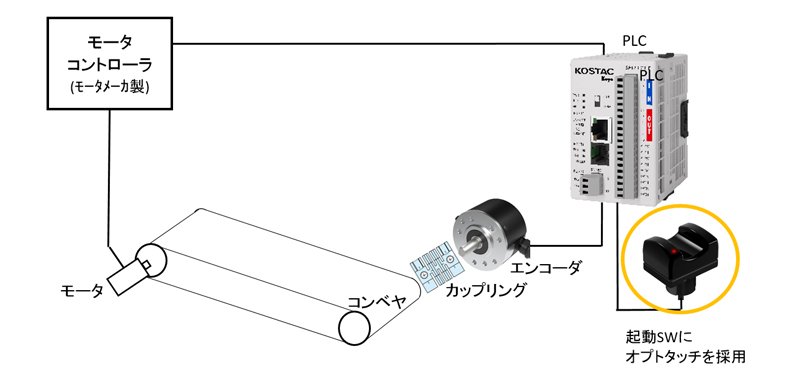 光学式タッチボタン 作業員の負荷軽減
光学式タッチボタン 作業員の負荷軽減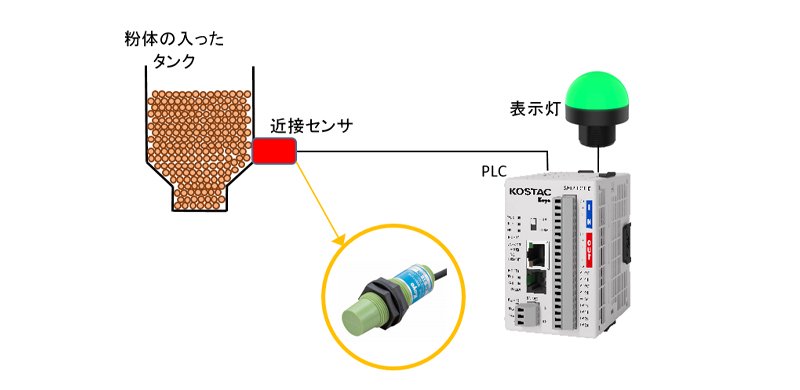 静電容量形近接センサを用いた粉体の有無の検出の使用事例
静電容量形近接センサを用いた粉体の有無の検出の使用事例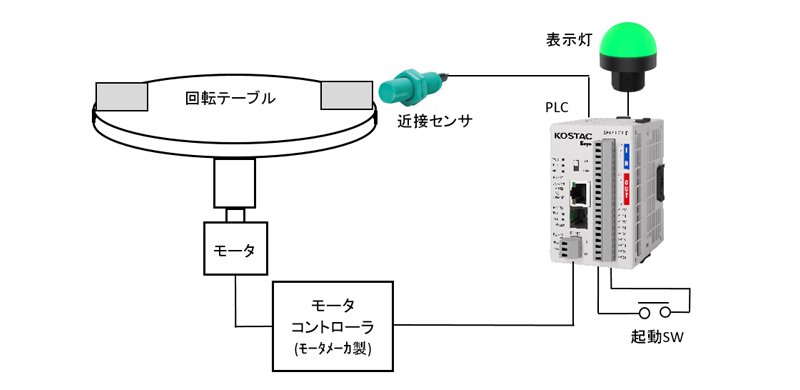 回転テーブル上にあるワークの有無を検出し、表示する
回転テーブル上にあるワークの有無を検出し、表示する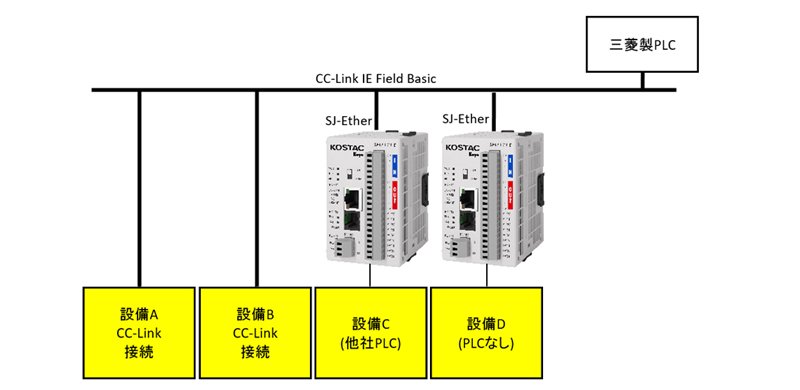 CC-Link IE Field Basic に接続
CC-Link IE Field Basic に接続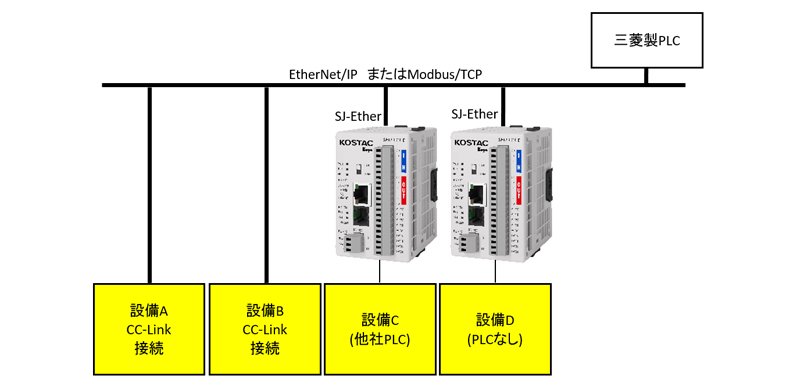 Ethernet(EtherNet/IP またはModbus/TCP)で接続させる使用事例
Ethernet(EtherNet/IP またはModbus/TCP)で接続させる使用事例PLC 関連ページ
その他 製品解説ページ
お問い合わせ
PLCに関してお問い合わせございましたらお気軽にお問い合わせください。
フリーコール:0120-900-774
受付時間:9時〜17時(土・日・祝日、弊社休日は除く)
お問い合わせ
製品検索
カテゴリーから探す
企業名から探す
コンテンツ
- サイトマップ
- 製品無料貸出について
- 当店メール受信について
- FAQ - よくある質問
- 通販サイト未掲載製品をお探しのお客様へ
- 当店ご利用はじめての方へ
- 【提案動画】 振動センサで予兆管理・異常の兆しを録画
- アプリケーション事例集
- PLC(プログラマブルロジックコントローラ)とは
- 工程改善(基板分割工程の省人化による製造経費削減)
- 近接センサ とは
- 耐環境コントローラ:汎用ミニECU
- J-PAS ハイパワーモデル パワーアシストスーツ / 株式会社ジェイテクト
- J-PAS LUMBUS パワーアシストスーツ / 株式会社ジェイテクト
- (株)ジェイテクトフルードパワーシステム(旧社名:豊興工業(株)) エアフィルタ使用例
- プライベートWeb展示会 アーカイブ
- 小型SJ-ETHER KPP サンプルプログラム集
- チョコ停ウォッチャーminiを使った生産工程のトラブル要因の特定方法
- ミスミ コンベア事例
- IOT スモールスタート
- コンテンツ 各種
- OnSinSensor Q&A
- PLC 置き換え、ラダープログラム 読出 / 書込方法
- 【廃型情報】プログラマブルコントローラ SA/SRシリーズ 受注終了のお知らせ
- 【再告知】電子カウンタ KCX-B6 シリーズ 受注終了のお知らせ
- アプリケーション事例 製品別
- ロータリエンコーダとは / 使われている場所、事例、選び方 を動画で簡単に解説
- ロータリエンコーダ 計算ツール
- JXシリーズ プログラミング紹介
- ACサーボシステムの動画紹介 知りたい情報満載!
- ロータリエンコーダの動画紹介 知っておきたい情報満載!
- 近接センサの動画紹介 知っておきたい情報満載!
- JX-BASICシリーズの動画紹介 知っておきたい情報満載!
- SJ-ETHERの動画紹介 知っておきたい情報満載!
- お支払い方法について
- 配送方法・送料について
- メルマガ登録・解除
- マイアカウント
- ログイン
 動画de提案
動画de提案
 出張サービス 技術者が伺います!
出張サービス 技術者が伺います!
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
|---|---|---|---|---|---|---|
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| 31 |
在庫品の場合、平日16時、祝日14時までのご注文で即日出荷いたします。
 (株)ジェイテクトエレクトロニクス
(株)ジェイテクトエレクトロニクス
ご注文の流れ
