
ジェイテクトグループ オフィシャル通販サイト
 ジェイテクトエレクトロニクス 公式サイト
ジェイテクトエレクトロニクス 公式サイト
ST-Servo 仕様
最終更新日 2024-07-19
仕様
| 項目 | 内容 | 備考 |
|---|---|---|
| 入力電源電圧 | DC24V±10% | |
| 駆動方式 | MOSFET PWM | 定格2A、ピーク3A以上の電源をご用意ください |
| 制御領域 | 4象限 | |
| PMW周波数 | 20kHz | |
| 制御方式 | 位置制御 | 指令パルスによる位置決め又は内部デジタル指令 |
| 速度制御 | アナログ指令又は内部デジタル指令 | |
| トルク制御 | アナログ指令又は内部デジタル指令 | |
| 押し当て制御モード | 位置制御、速度制御でのトルク制限制御 | |
| 対応負荷イナーシャ | ロータイナーシャの20倍以下 |
位置制御
| 位置モード(3モード) | 1)フルタイムクローズモード
(杖常にクローズ制御) 2)デュアルモード (設定速度以下でオープン制御、設定速度以上でクローズド制御) 3)フルタイムオープンモード (常にオープン制御) |
注)内部コマンドで回転指令を与える場合デュアルモードの切り替え速度はゼロでご使用ください。 更にフルタイムオープンモードは使用できません。 |
| パルス列入力 | 1パルス、2パルス、2相パルス
3通りの選択可能 |
|
| エンコーダ分解能 |
□20モータ: 6400ppr
□25、28モータ:9600pr □42、□56モータ:16000ppr |
|
| 位置精度 | エンコーダ分解能の±1パルス | |
| 指令最大周波数 | 880(kpps) | 注1 |
| 電子ギア |
A/B
A = 1〜10000 B = 1〜10000 |
ファームウェアバージョンVer1.07以前はフルタイムクローズモードのみ設定可
Ver1.08以降よりすべてのモードで設定可能 |
| フィードフォワード | 0〜100(%) | |
| 位置決め完了範囲 | 1〜±1000 | |
| フルカウント異常範囲 | 1〜±2147483647 | |
| 回転方向 | パルス入力時の回転方向設定 |
注1)値値はドライバとしての最大応答周波数でご使用時の最大周波数はモータとの組み合わせによります。
速度制御
| 速度制御比 | 350 : 1 以上 | |
| 速度指令 |
・外部0〜±5 又は0〜±10V
・内部デジタル値(pps) |
注2 |
| 回転方向 |
・デジタル入力(ROT_DIR)
・内部パラメータ |
注2、注3 |
| 起動/停止 |
・デジタル入力(START)
・内部パラメータ |
注2 |
| 加減速機能 |
n × MAXrpm × 1ms
内部パラメータ n : 0〜10 |
N=0 の時は加減速なし |
注2)外部と内部の選択はパラメータで設定します。
注3)速度指令がアナログ指令の場合は本入力により回転方向を切り替えることができます。
Vref+がVref-に対しプラスのとき回転方向がOFF(又は'0')でモータはCWに回転し、
回転方向がON(又は'1')でモータはCCWに回転します。
位置・速度制御共通
| 最大トルク可変範囲 | 0〜10000 (×0.1%) | 100.0%でモータの定格トルクの1.5倍 |
| ループエラー検出時間 | 500〜10000(ms) |
速度ループ異常
(モータが指令に追従できていないことが原因) |
トルク制御
| トルク可変範囲 | 350 : 1以上 | |
| トルク指令 |
・外部0〜±5 又は0〜±10V
・内部デジタル値(%) |
注4 |
| 速度制限 | デジタル値(rpm) | 内部パラメータ |
| 指令回転方向 |
・デジタル入力(ROT_DIR)
・内部パラメータ |
注4、注5 |
| 起動/停止 |
・デジタル入力(START)
・内部パラメータ |
注4 |
注4)外部と内部の選択はパラメータで設定します。
注5)トルク指令がアナログ指令の場合は本入力により回転方向を切り替えることができます。
Vref+がVref-に対しプラスのとき回転方向がOFF(又は'0')でモータはCWに回転し、
回転方向がON(又は'1')でモータはCCWに回転します。
押し当て制御
| 制御形態 |
・位置制御による押し当て ・速度制御による押し当て |
|
| 押し当てトルク制限値 |
・外部0〜±5 又は0〜±10V
・内部デジタル値(%) |
外部指令置は絶対値で処理されます |
| デジタル制限値可変範囲 | 0〜1000 (×0.1%) | 100.0%でモータの定格トルク |
共通
| サーボオン | 駆動可能入力 | 出荷時は入力OFFでサーボオン |
| アラーム出力 | 異常時出力 | 出荷じはアラーム時出力ON |
入出力及び表示機能
|
デジタル入力信号
(非絶縁) |
入力点数7点アサイン及び入力論理が変更可能 | |
| 1)サーボオン | ||
| 2)/アラームリセット | ||
| 3)/スタート | 起動/停止用 | |
| 4)/P制御 | 比例制御 | |
| 5)制御モード切換え |
0. 位置制御 ⇔ /速度制御
1. 位置制御 ⇔ /トルク制御 2. 位置制御 ⇔ /押し当て制御(位置) 3. 位置制御 ⇔ /押し当て制御(速度) 4. 速度制御 ⇔ /トルク制御 5. 速度制御 ⇔ /押し当て制御(速度) 各モードはパラメータで選択 |
|
| 6)方向 |
速度/トルク制御時の回方向入力
"H"で CW回転、"L"で CCW回転 |
|
| 7)/偏差カウンタクリア | ||
| 8)予備入力1点 | ||
|
アナログ入力
(非絶縁) |
速度指令/トルク指令/押し当てトルク制限値入力 | 0〜±5V 又は 0〜±10V |
|
デジタル出力信号
(非絶縁) |
出力点数 3点アサイン及び出力論理は変更可能 | |
| 1)/インポジション | インポジション(位置制御時) | |
| 2)/ZSP |
ゼロ速度(速度制御時)
モータ停止時に出力 |
|
| 3)アラーム | アラーム(論理は変更可能) | |
| 4)/トルクリミット | トルク制限中(トルク制御又は押し当て制御時) | |
| 5)/VCMP |
速度到達(速度制御時)
回転数が指令値の95%以上に達したことを示す |
|
| LED 表示機能 | POW (緑色) | 電源が投入され初期化が終わったことを示すパラメータの変更により電源再投入を要求するときは点滅します |
| ALM (赤色) |
ドライバが異常であることを示す アラーム内容は点滅回数で判別 |
|
| アナログモニタ出力 | モータ速度、指令速度、指令トルク、モータトルク、位置偏差 |
アナログ出力
0Vを基準とする |
| RS485 |
ノード数:254
半二重、調歩同期式 ポーレート:9600、19200、38400、57600、115200 データサイズ:7bit、8bit パリティ:無し、偶数、奇数 ストップビット:1bit |
SW1-1がONの設定で本製品の電源を投入されたとき、通信設定のみ下記の初期状態で起動します。
ポーレート:38400 データ長:8bit パリティ:無し ストップビット:1bit プロトコル:MODBUS ASCII アドレスID:0 |
| 設定機能 |
・基板内トリマーで設定
速度ループゲイン調整 ・RS485 ポートより設定 1. 位置ループゲイン 2. 速度ループベース比例ゲイン 3. 速度ループ積分時定数 4. 速度フィードバックゲイン 5. 微分補償ゲイン 6. フィードフォアード(%) 7. P制御時の比例ゲイン 8. その他の各パラメータ |
|
| アラームの種類 |
ループエラー、フルカウント、過速度、過電圧、ゲイン調整不良、
EEPROMエラー、位置補正異常 |
|
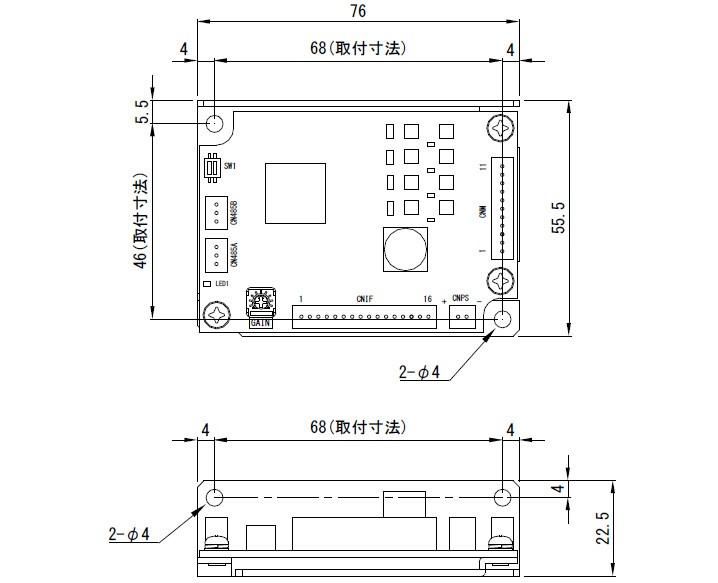
| 外形 | W76 × D55.5 × H22.5mm | |
| 重量 | 58g | コネクタソケットは含まず |
| 動作温度・温度 | 0〜50℃、85%RH以下 | 結露なきこと |
| 保存温度 | -20〜85℃、85%以下 | 結露なきこと |
| 雰囲気 | 腐食性ガスのないこと | |
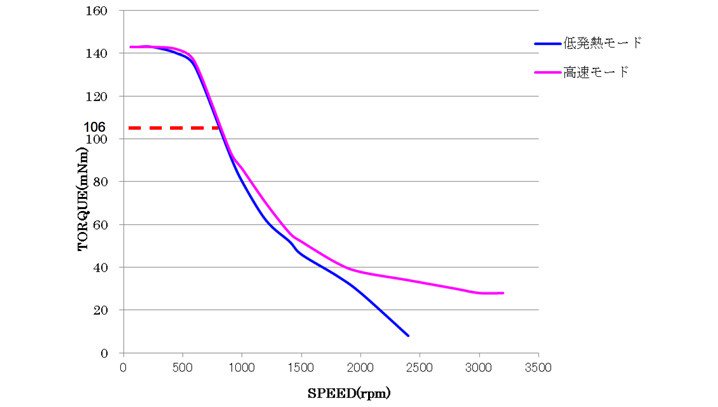
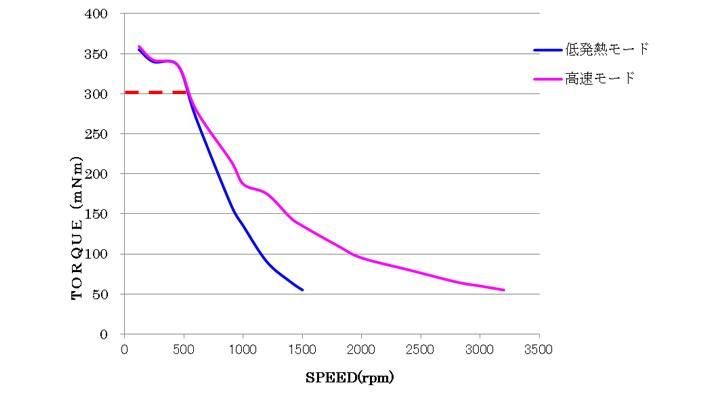
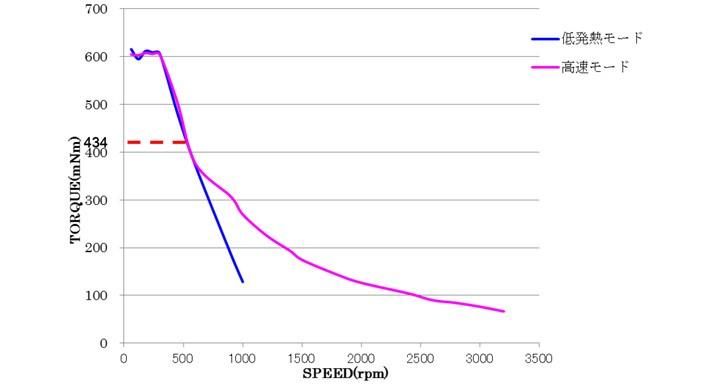
回転速度 - トルクカーブ
型式:STM25S(W)100A,STM28S(W)100A
型式:STM42S(W)100A
型式STM42S(W)101A
型式:STM56S(W)100A
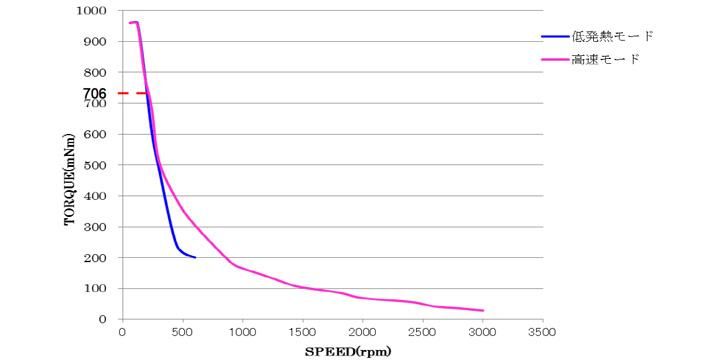
ー ー ー ー ー 連続定格トルク
注)連続定格トルクを超えるトルクは瞬時トルクとなります。
尚、トルク制御及び押し当て制御時の最大トルクは連続定格トルクとなります。
外形図
SPL
外形図 - モータ
□25
型式:STM25S(W)100A,STM28S(W)100A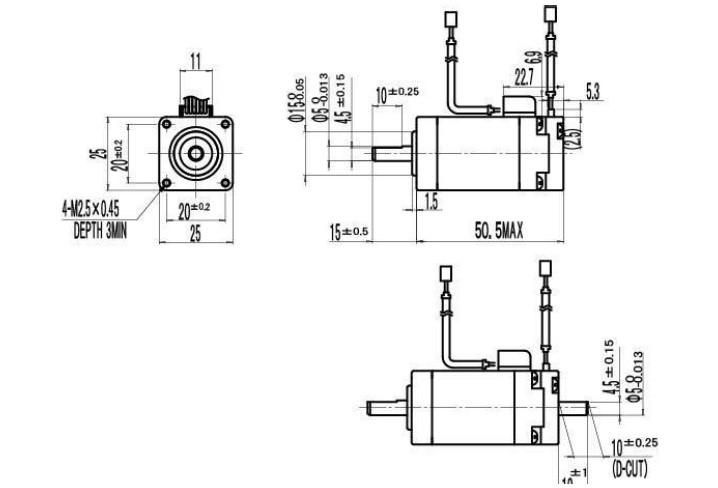
□28
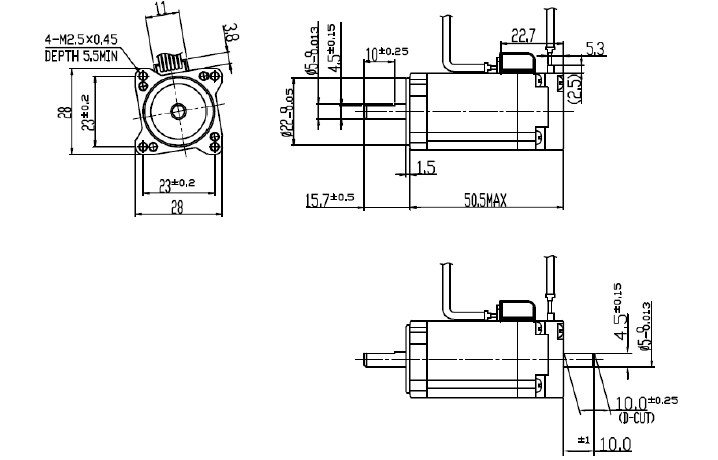
| モータ型式 | ロータイナーシャ | 質量 |
|---|---|---|
| STM25S(W)100A | 4gcm2 REF. | 120g REF. |
| STM28S(W)101A | 4gcm2 REF. | 120g REF. |
□42
型式:STM42S(W)100A,STM42S(W)101A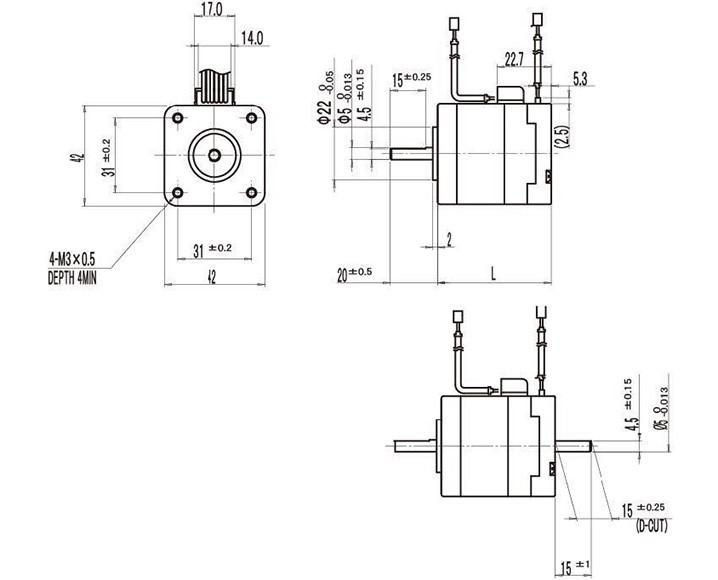
| モータ型式 | L寸法 | ローターイナーシャ | 質量 |
|---|---|---|---|
| STM42S(W)100A | 48 | 50gcm2 REF. | 270g REF. |
| STM42S(W)101A | 58 | 75gcm2 REF. | 370g REF. |
□56
型式:STM56S(W)100A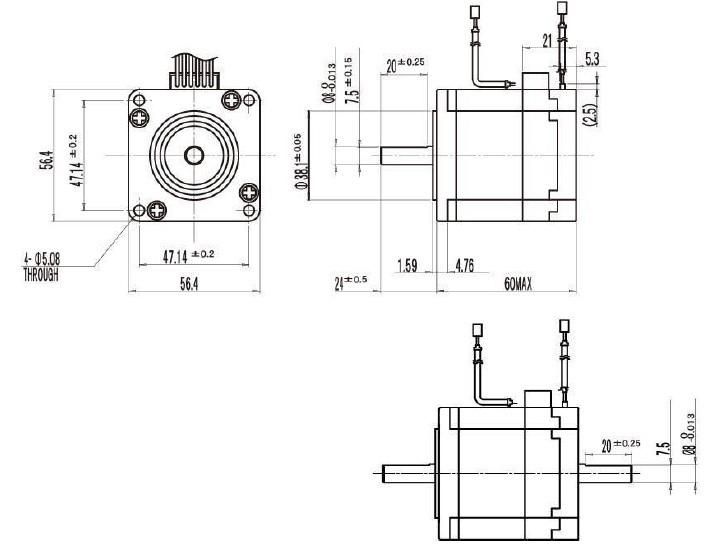
| モータ型式 | ローターイナーシャ | 質量 |
|---|---|---|
| STM56S(W)100A | 180gcm2 REF. | 620g REF. |
オプションアダプタ(別売)
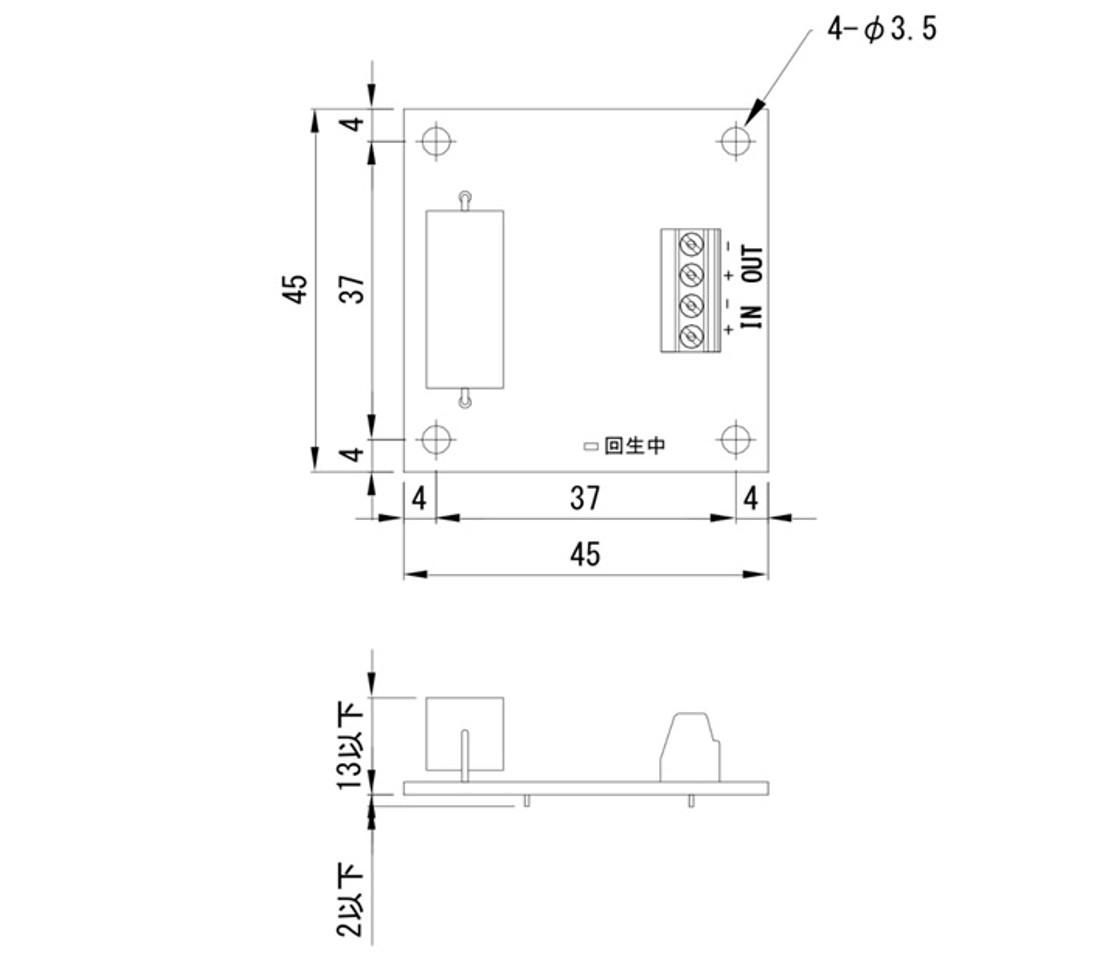
ST-Servoシステム用 回生ユニット ST-RG3
製品の特長
-
本製品は ST-ServoBSL、ST-ServoCMB 及び ST-ServoSPL 用の回生吸収ユニット基板です。
本製品を+24V 電源又は+48V 電源と上記ドライバ間に接続することによりドライバからの回生エネルギーを抵抗で放電させて電源電圧の上昇を防ぐことができます。 - DIN レール取り付け用のオプションケースもご用意しております。
- 回生ユニットは ST-ServoCMB 又は ST-ServoSPL の場合は ST-RG3-24V、ST-ServoBSL の場合は ST-RG3-48Vの2種類がございますので基板上の捺印をご確認下さい。
インターフェイス
<CNPS(電源用)>
注1)コネクタCNPSの近くにジャンパポストが立っているため
ソケットを挿入の際は怪我をしないよう十分注意して下さい。
注2)ピーク電流による電圧降下を考慮してドライバ入力部で規定電圧になるように
線径及び長さの線材を選択して下さい。
注3)本ドライバは突入電流抑制回路を内蔵しておりません。
突入電流はご使用される電源の特性や配線インピーダンスに依存しますので実機で確認して下さい。
その際の突入電流が10ms以上10Aを超えないように対策して下さい。
| No. | 信号名 | 内容 | 備考 |
|---|---|---|---|
| 1 | +24V | 主電源プラス | +24V±10%、定格 2A, ピーク 3A |
| 2 | 0V | 主電源0V |
注1)コネクタCNPSの近くにジャンパポストが立っているため
ソケットを挿入の際は怪我をしないよう十分注意して下さい。
注2)ピーク電流による電圧降下を考慮してドライバ入力部で規定電圧になるように
線径及び長さの線材を選択して下さい。
注3)本ドライバは突入電流抑制回路を内蔵しておりません。
突入電流はご使用される電源の特性や配線インピーダンスに依存しますので実機で確認して下さい。
その際の突入電流が10ms以上10Aを超えないように対策して下さい。
<CNIF(インターフェース用)>
注意)本デジタル入出力は非絶縁となっております。
ケーブル長が1mを超える場合は上位側でフォトカプラによる絶縁処理を行って下さい。
| No. | 信号名 | 内容 | I/O | 備考 |
|---|---|---|---|---|
| 1 | IN1 | デジタル入力1 | IN | 出荷時はサーボ |
| 2 | IN2 | デジタル入力2 | IN | 出荷時は起動/停止 (速度、トルク制御時用) |
| 3 | IN3 | デジタル入力3 | IN | 出荷は回転方向 (CW / CCW)
(速度、トルク制御時用) |
| 4 | IN4 | デジタル入力4 | IN | 出荷時はアラームリセット |
| 5 | IN5 | デジタル入力5 | IN | 出荷時はモード切り換え |
| 6 | IN6/P1 | デジタル入力6 | IN | 指令パルスP1入力を兼ねる |
| 7 | IN7/P2 | デジタル入力7 | IN | 指令パルスP2入力を兼ねる |
| 8 | OUT1 | デジタル出力1 | OUT | 出荷時はインポジション(位置制御時) ゼロ速度(速度制御時) |
| 9 | OUT2 | デジタル出力2 | OUT | 出荷時はアラーム |
| 10 | OUT3 | デジタル出力3 | OUT | 出荷時はトルクリミット |
| 11 | GND | 入出力のシグナルグランド | − | |
| 12 | +5V | アナログ指令用電源 | OUT | 最大 10mA |
| 13 | Vref+ | アナログ指令プラス側 | IN | 入力インピーダンス 100kΩ |
| 14 | Vref- | アナログ指令マイナス側 | IN | |
| 15 | AMON | アナログモニタ出力 | OUT | |
| 16 | AGND | モニタ用 GND | − |
注意)本デジタル入出力は非絶縁となっております。
ケーブル長が1mを超える場合は上位側でフォトカプラによる絶縁処理を行って下さい。
<CNM(モータ用)>
注1)オープンコレクタタイプのエンコーダはここに接続してください。
注2)本ドライバの付属ケーブルはシールド処理を行っておりません。
1mを超えるケーブルをご使用される場合は必ずシールド付きケーブルを使用してください。
| No. | 信号名 | 内容 | |
|---|---|---|---|
| 1 | A+ | エンコーダA相+ | 注1 |
| 2 | A- | エンコーダA相− | |
| 3 | B+ | エンコーダB相+ | 注1 |
| 4 | B- | エンコーダB相− | |
| 5 | +5V | エンコーダ用電源+5V | |
| 6 | GND | エンコーダ用電源GND | |
| 7 | FG | シールド | 注2 |
| 8 | A | モータ A相 | |
| 9 | /A | モータ / A相 | |
| 10 | B | モータ B相 | |
| 11 | /B | モータ / B相 |
注1)オープンコレクタタイプのエンコーダはここに接続してください。
注2)本ドライバの付属ケーブルはシールド処理を行っておりません。
1mを超えるケーブルをご使用される場合は必ずシールド付きケーブルを使用してください。
<CN485A,B(RS485用)>
注意)ケーブル長が50cmを超える場合はSig-AとSig-Bを撚り線にする又は3芯シールドケーブルを使用して下さい。
| No. | 信号名 | I/O | 内容 |
|---|---|---|---|
| 1 | Sig-A | IN/OUT | 信号線A |
| 2 | Sig-B | IN/OUT | 信号線B |
| 3 | SG | − | シグナルグランド |
注意)ケーブル長が50cmを超える場合はSig-AとSig-Bを撚り線にする又は3芯シールドケーブルを使用して下さい。
<適合ハウジングコネクタとコンタクトの型式>
| 記号 | 用 途 | 型式 | 適用線材 | メーカー |
|---|---|---|---|---|
| CNPS | 電源用 | ハウジング:PAP-02V-S | AWG#26〜22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 | ||||
| CNIF | インターフェース用 | ハウジング:PAP-16V-S | AWG#26〜22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 | ||||
| CN485 | RS485 用 | ハウジング:PAP-03V-S | AWG#26〜22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 | ||||
| CNM | モータエンコーダ用 | ハウジング:PAP-11V-S | AWG#26〜22 | 日本圧着端子製造 |
| コンタクト:BPHD-001T-P0.5 |
お問い合わせ
製品検索
カテゴリーから探す
企業名から探す
コンテンツ
- サイトマップ
- 製品無料貸出について
- 当店メール受信について
- FAQ - よくある質問
- 通販サイト未掲載製品をお探しのお客様へ
- 当店ご利用はじめての方へ
- 【提案動画】 振動センサで予兆管理・異常の兆しを録画
- アプリケーション事例集
- PLC(プログラマブルロジックコントローラ)とは
- 工程改善(基板分割工程の省人化による製造経費削減)
- 近接センサ とは
- 耐環境コントローラ:汎用ミニECU
- (株)ジェイテクトフルードパワーシステム(旧社名:豊興工業(株)) エアフィルタ使用例
- プライベートWeb展示会 アーカイブ
- 小型SJ-ETHER KPP サンプルプログラム集
- チョコ停ウォッチャーminiを使った生産工程のトラブル要因の特定方法
- ミスミ コンベア事例
- IOT スモールスタート
- コンテンツ 各種
- OnSinSensor Q&A
- PLC 置き換え、ラダープログラム 読出 / 書込方法
- 【廃型情報】プログラマブルコントローラ SA/SRシリーズ 受注終了のお知らせ
- 【再告知】電子カウンタ KCX-B6 シリーズ 受注終了のお知らせ
- アプリケーション事例 製品別
- ロータリエンコーダとは / 使われている場所、事例、選び方 を動画で簡単に解説
- ロータリエンコーダ 計算ツール
- JXシリーズ プログラミング紹介
- ACサーボシステムの動画紹介 知りたい情報満載!
- ロータリエンコーダの動画紹介 知っておきたい情報満載!
- 近接センサの動画紹介 知っておきたい情報満載!
- JX-BASICシリーズの動画紹介 知っておきたい情報満載!
- SJ-ETHERの動画紹介 知っておきたい情報満載!
- お支払い方法について
- 配送方法・送料について
- メルマガ登録・解除
- マイアカウント
- ログイン
 動画de提案
動画de提案
 出張サービス 技術者が伺います!
出張サービス 技術者が伺います!
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 | 31 |
営業時間:9:00〜17:00 (土・日、弊社休日(赤文字)は除く)
在庫品の場合、平日16時、祝日14時までのご注文で即日出荷いたします。
在庫品の場合、平日16時、祝日14時までのご注文で即日出荷いたします。
 (株)ジェイテクトエレクトロニクス
(株)ジェイテクトエレクトロニクス
ご注文の流れ
